Video gallery
Video Presentations
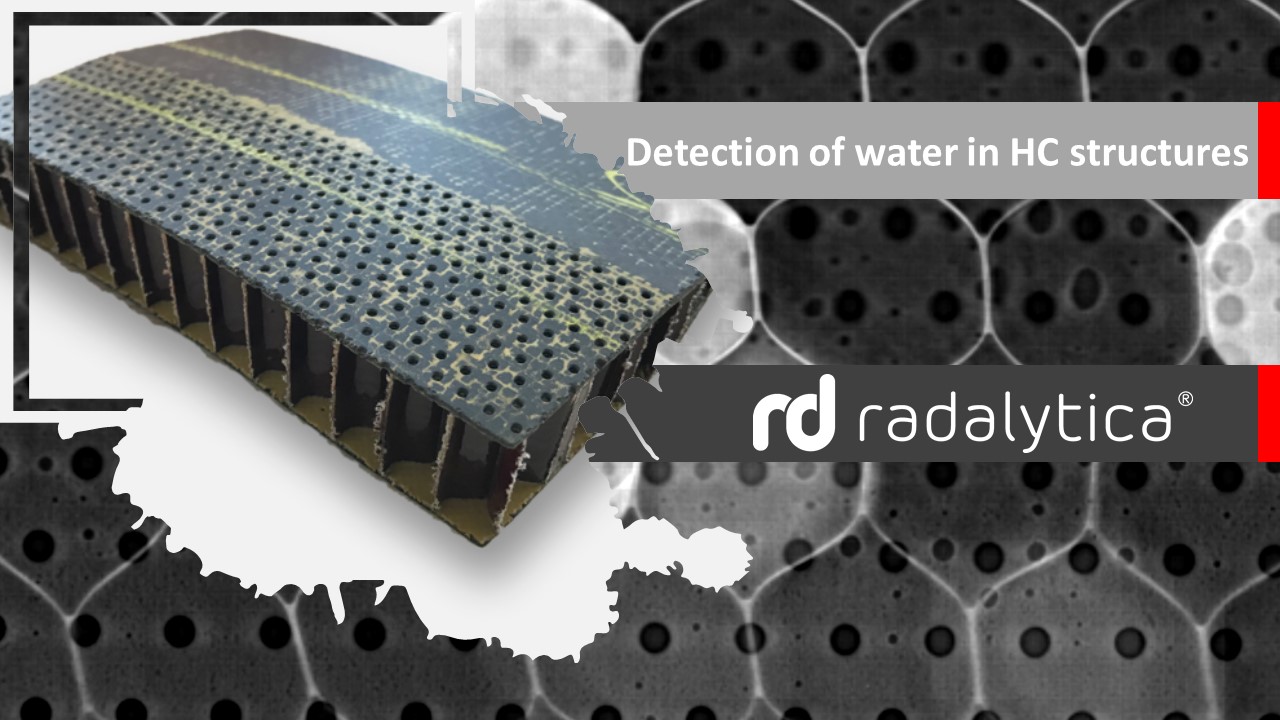
Detection of water in honeycomb structure
This presentation shows detection of water in honeycomb structure. It was tested on a CFRP sandwich with Nomex honeycomb and the sample was measured with the dual robot RadalyX scanner
Watch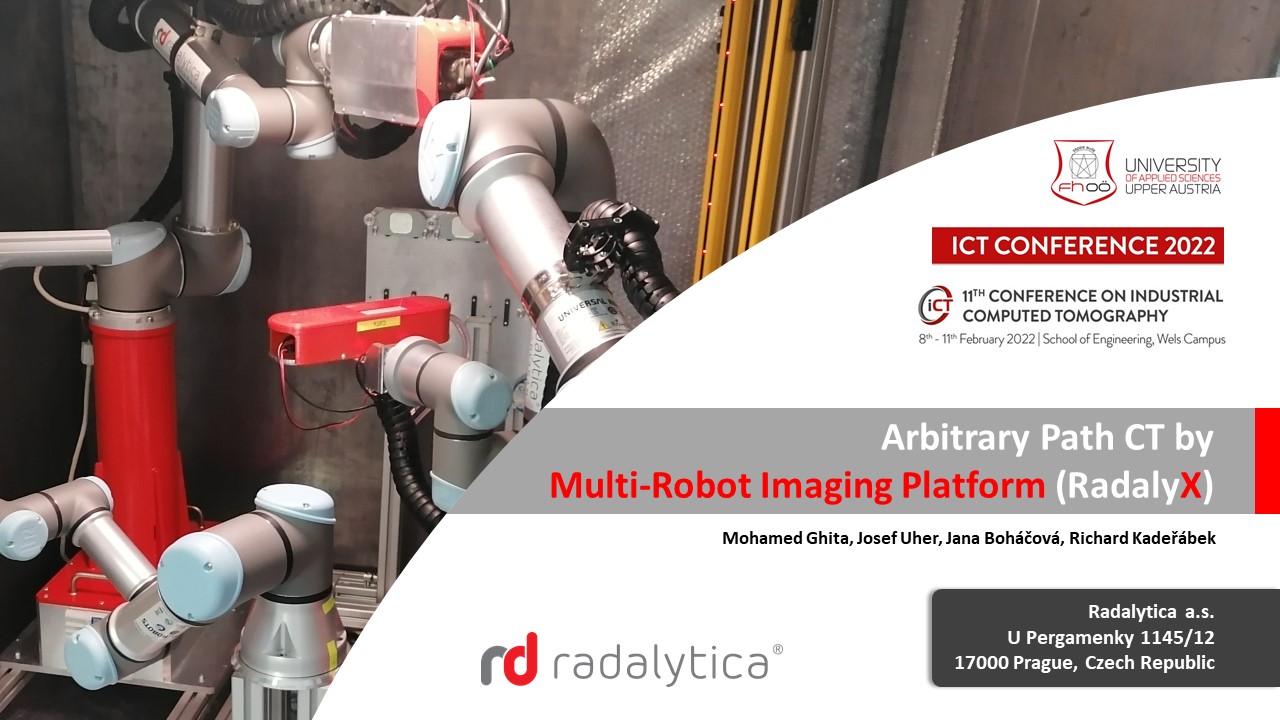
Arbitrary Path CT by Multi-Robot Imaging Platform (RadalyX)
Robotics in NDT are confused with tripods to hold imaging devices.
Here, we present robotics as functional scanning elements to measure arbitrary path NDT scans.
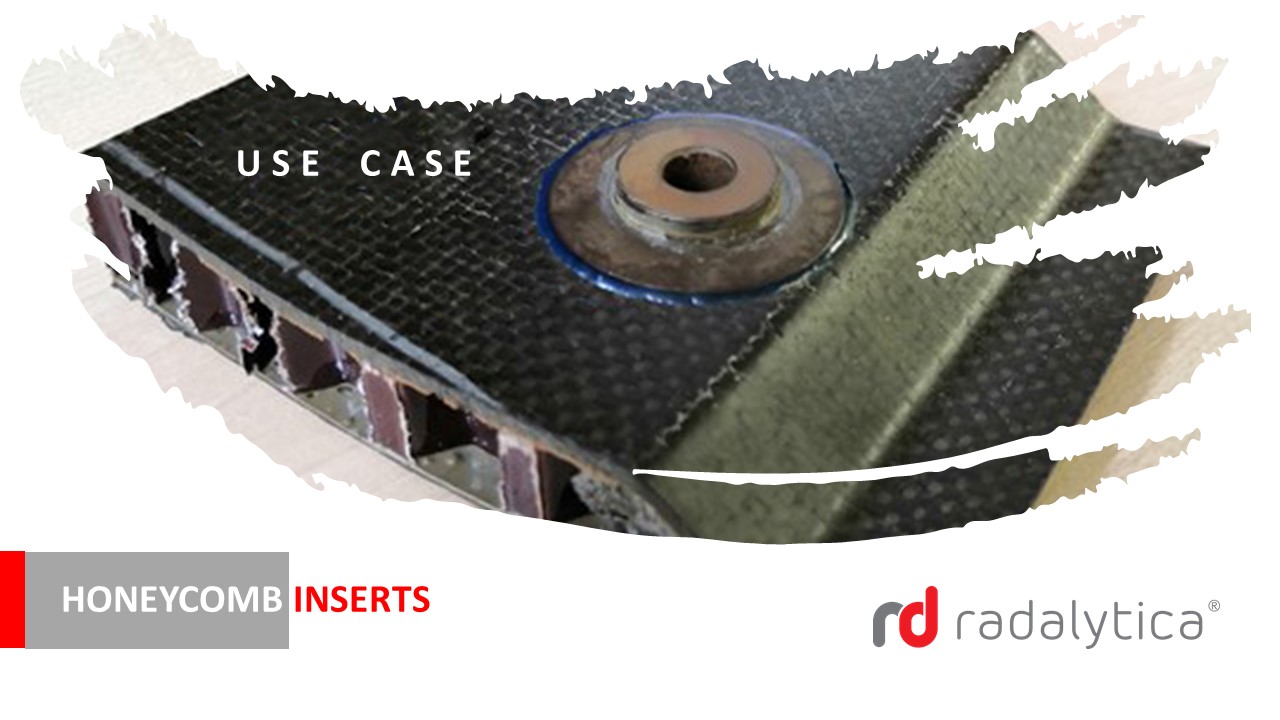
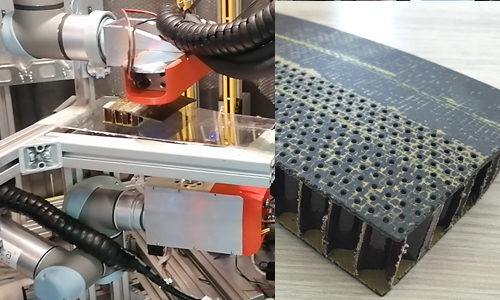
Honeycomb inserts-use case
In this presentation we deals with the Non Destructive investigation of the potted insert in Nomex® honeycomb sandwich structures with glass carbon-reinforced composite skins.
Watch
Robotic Non-Destructive Control 4.0
A Webinar hosted by Radalytica on March 18 2021
(English presentation with Czech commentary)
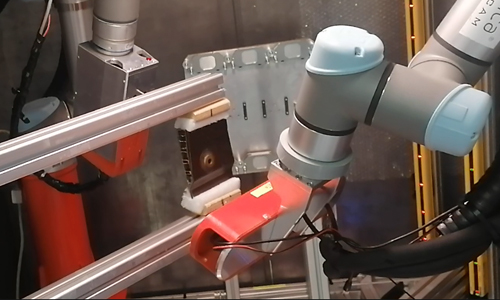
Realtime X-ray robotic inspection of a carbon bike frame
The robotic X-ray imaging system developed by Radalytica helps to find smallest defects or cracks in light materials. The system capabilities are shown on scan of a high performance carbon fibre bike frame.
Watch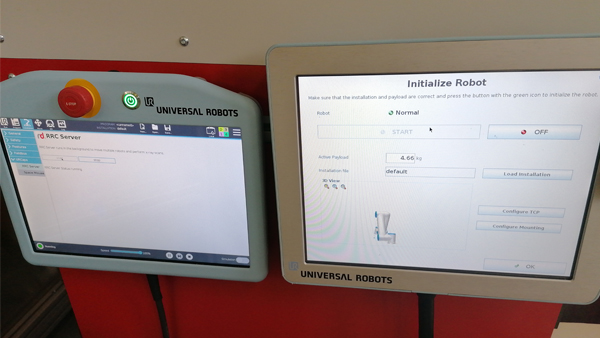
Twin robot free-drive
This video shows you precise synchronization of our robots developed by Radalytica.
Watch
Precise real-time Universal robot control using 3D move
Radalytica a.s. has developed a 3D mouse based robot real-time control. Controlling the robot is so precise yet easy to use that it is possible to do even complex operations, like pouring water from a cup.
Watch
Video Measurements

- CT of a clay statue

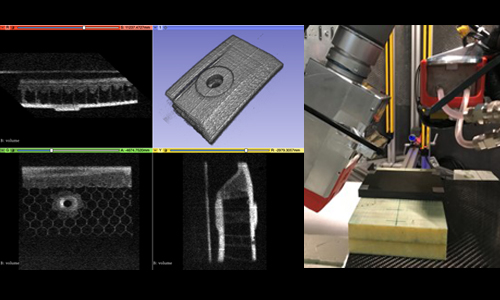
- Honeycomb insert - laminography
- Honeycomb panel (CFRP skins and Al core): detection of bubbles and gluing quality. The X-ray focal plane goes through the thickness of the object.

- Fridge inspection
- Localisation of defects in fridge insulation.
- Water in honeycomb - laminography
- Detection of water in honeycomb panel. The X-ray focal plane goes through the thickness of object.
- Backscattering - Gap detection
- Backscattering: a novel method to obtain 3D information on composite parts with access only (the X-ray tube and detector are both on the same side of the sample). Backscattering allows measurement of gap sizes between composite sheets.
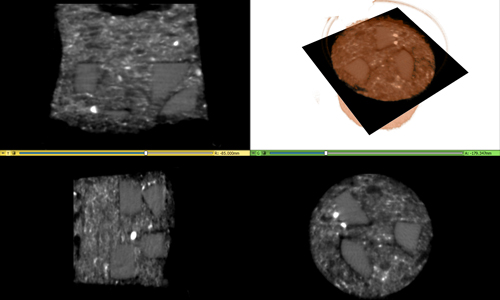
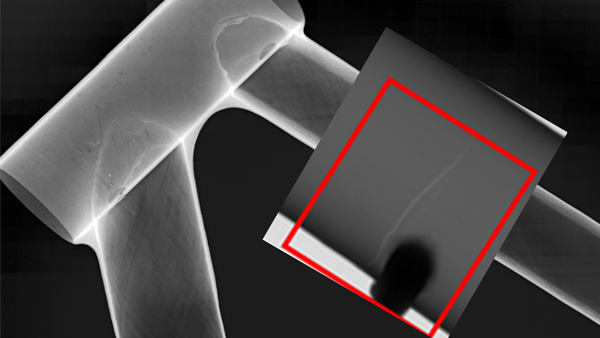
- CT of a pot with soil and potato inside
- This experiment demonstrates that the potato becomes easily detectable in CT whereas it is invisible in regular 2D image (image in the corner).