RadalyX Technologie
Bezprecedentní rentgenová zobrazovací kvalita umožňuje celou řadu skenovacích režimů.
"Jestliže naše zařízení neuvidí, co potřebujete vidět, pak žádné jiné."
Josef Uher, CTO
Nová generace RTG zobrazení
Ve srovnání s běžnými rentgenovými zobrazovacími technologiemi, jako jsou filmy nebo ploché panely, používáme novou generaci digitálních RTG detektorů společnosti ADVACAM, které pro své jedinečné vlastnosti využívá i americká NASA ve vesmíru na mezinárodní stanici ISS.
Tyto zobrazovací detektory se vyznačují vysokým rozlišením, téměř neomezeným rozsahem stupňů šedi, vysokou citlivostí a prostorovým rozlišením, a v neposlední řadě širokým rozsahem aplikací.
Výhodou použití těchto pokročilých detektorů je skutečnost, že díky jejich citlivosti jsme schopni využít až polovinu energie rentgenového záření ve srovnání se stávajícími technologiemi. To znamená vyšší rozlišení obrazu, ale také nižší nároky na stínění proti úniku rentgenového záření.
To zjednodušuje, snižuje náklady a odlehčuje konstrukci stínících komor.
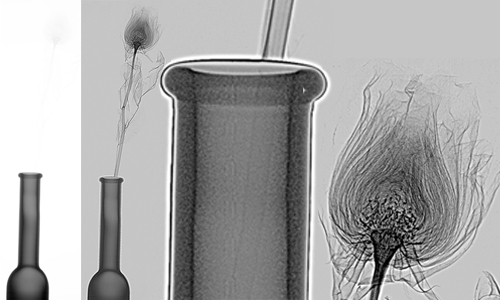
Rentgenový snímek suché růže demonstruje bezprecedentní kvalitu rentgenového zobrazování. Na rozdíl od standardního rentgenového zařízení, které není schopno zobrazit suchou růži ve váze, rentgenový snímek robotického systému používajícího detektory Advacam ve vysokém rozlišení a kontrastu ukazuje současně jak všechny jemné části květu, tak i stonek uvnitř vázy!
NĚCO, CO DOPOSUD NEBYLO MOŽNÉ!
Kombinace zobrazovacích metod
JEDNA PLATFORMA ZVLÁDNE VŠE!
Vzduchem vázaný ultrazvuk nebo LEA (Laser Excited Acoustics) jsou zvláště účinné například při detekci delaminací v kompozitních materiálech, které jsou rentgenovými paprsky prakticky neviditelné.
Dobrým příkladem je poškozené kompozitní křídlo letadla po nárazu do cizího objektu. RTG snímek odhalí strukturu kompozitu a jeho možné poškození zobrazením jemných trhlin v místě nárazu. Delaminaci v okolní oblasti však rentgen detekovat nemůže. Ultrazvuk je nicméně vhodný pro detekci delaminace, ale neumožňuje zobrazení jemných trhlin ve vysokém rozlišení.
ŘEŠENÍM JE KOMBINACE OBOU TĚCHTO METOD
Vzduchem vázaný ultrazvuk (UT)
Radalytica je první společností, která dokázala, že RTG a Ultrazvuk jsou komplementární metody pro NDT. V mnoha případech je vhodné použít více než jednu metodu najednou, abyste získali lepší přehled o vzorku.
- Vzduchem vázaný ultrazvuk vs. RTG

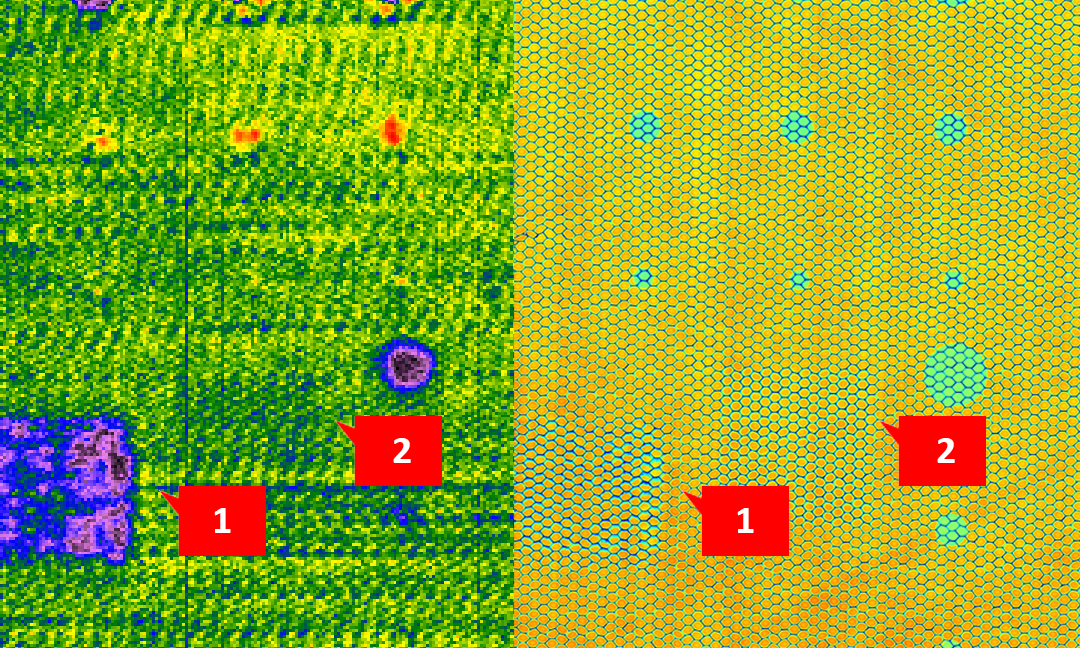
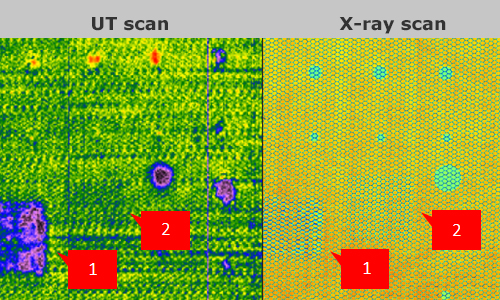
Voštinový sendvičový panel
Voštinový sendvičový panel s uměle vytvořenými vadami ve spojení voštin a pláště. Oba skeny ukazují umělé kruhové vložky simulující odpojení voštin od pláště. Rentgen dokáže odhalit velikosti všech vad. UT detekuje delaminaci na úrovni ~4 buněk.
- UT and X-ray combination
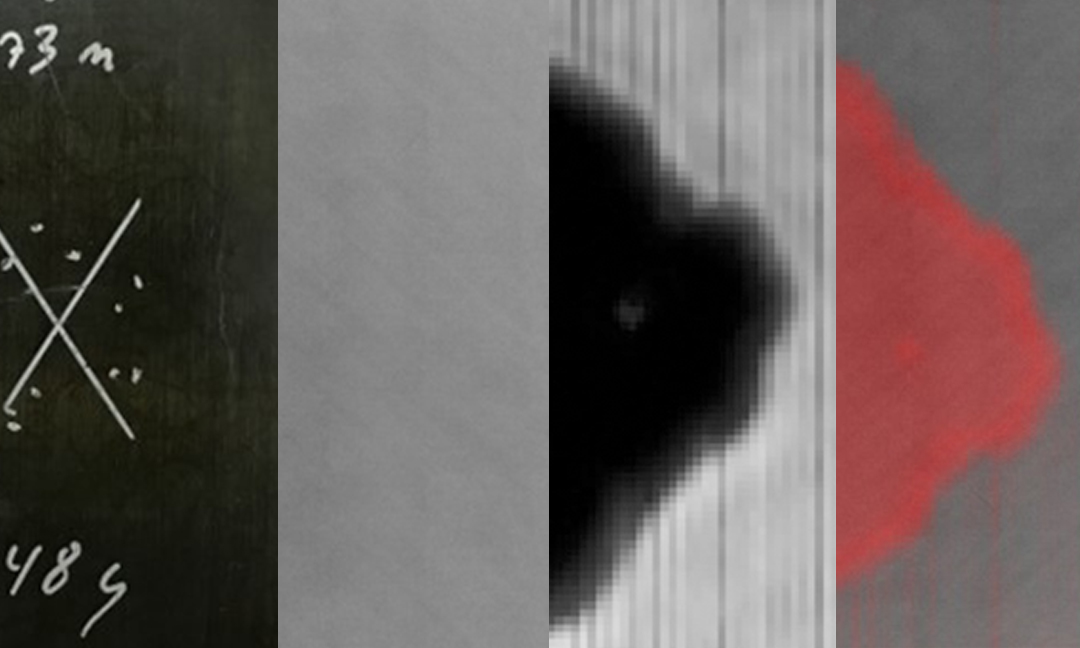
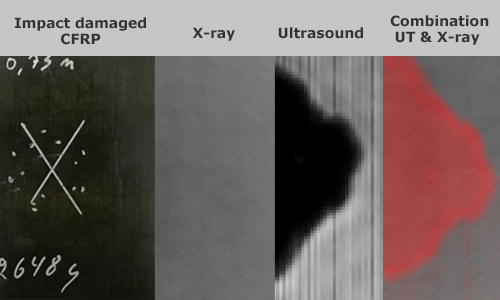
Nárazem poškozená CFRP
Porovnání RTG a UT na vzorku CRFP Ve výše uvedeném příkladu detekují UT i RTG poškozenou oblast, UT detekuje delaminaci, ale pouze kombinace metod ukazuje všechny dostupné údaje – delaminace, trhliny i svazky vláken.
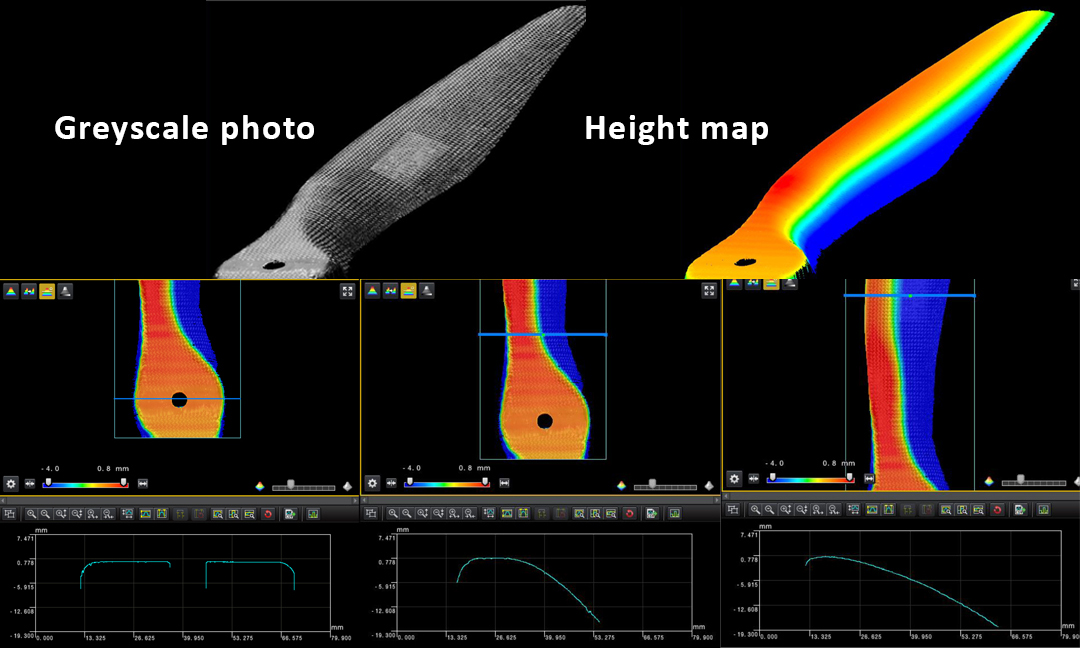
Laserový profiler je zobrazovací nástroj, který poskytuje přesné informace o naskenovaném vnějším tvaru objektu s přesností až do hloubky asi 30 µm. Tento nástroj lze použít přímo k analýze přesnosti vyráběných dílů včetně jejich povrchové struktury. Měření profilerem i měření s ostatními zobrazovacími nástroji jsou zaznamenávána ve stejném souřadnicovém prostoru. Proto mohou data laserového profileru sloužit také jako zdroj pro zlepšení výsledků výpočtově-tomografických rekonstrukcí. Profiler využívá rychloupínání na robota pro rychlou změnu zobrazovacích modalit.

- Laserový 3D profiler
- Laserové profilování povrchu
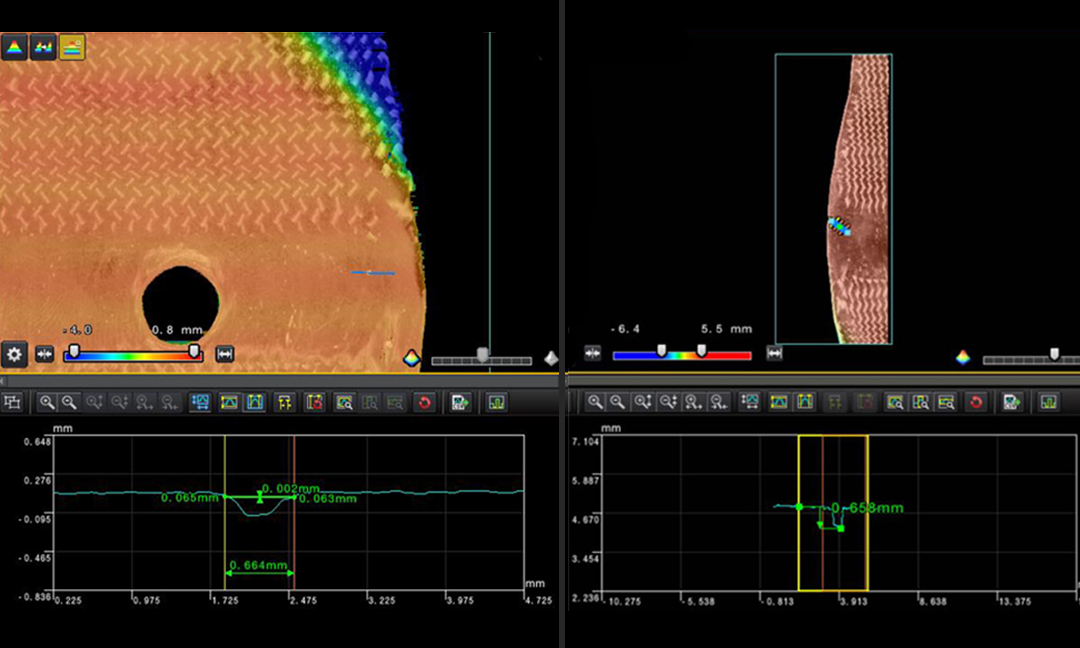
- Inspekce vrtule dronu
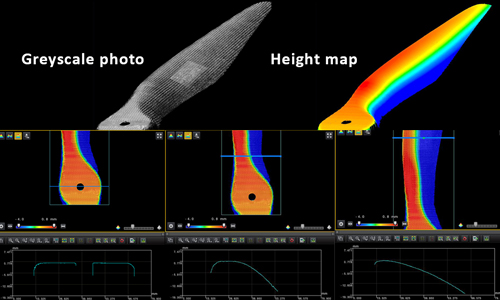
- Kontrola horní profilové plochy vrtule dronu
- Měření provedené systémem RadalyX
- Zpracování výsledků
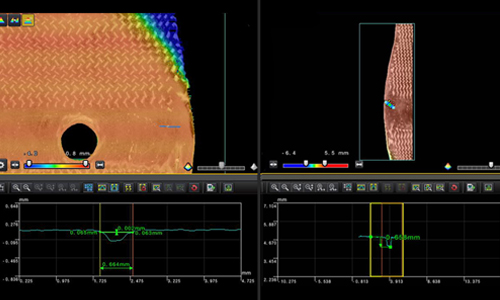
- Měření velikosti otvoru
- Měření provedené systémem RadalyX
- Laserové profilování povrchu
Zobrazení v reálném čase pomocí 3D myši umožňuje plnou kontrolu nad polohou a pozorovacím úhlem RTG zobrazování. Jednoduše, jakmile posunete a nakloníte 3D pohyb myši, roboti budou následovat stejný náklon a posun. Rentgenový snímek dané oblasti vzorku se zobrazuje v reálném čase na obrazovce. Jednoduché ruční ovládání pomocí okamžitého zobrazení vytváří dokonalý nástroj pro lokalizaci závad v kontrolované konstrukci ve 3D. Proto je kontrola pomocí robotů rychlejší, méně náročná na zpracování dat ve srovnání s CT a lze ji aplikovat na vybrané oblasti většího objektu.

Intuitivní pohybová odezva v reálném čase
3D Myš lze využít k nastavení robotů během programování nebo k jejich ovládání při provádění jednotlivých úkonů.
Zobrazení v reálném čase
OBROVSKÝ BENEFIT je také možnost dálkového ovládání robotů, nezávisle na poloze uživatele.