RadalyX Tecnologia
La qualità senza precedenti delle immagini radiografiche consente una varietà di modalità di scansione.
"Se la nostra macchina non vede ciò di cui hai bisogno, nessun altro lo fa."
Josef Uher, CTO
Immagine radiografica di nuova generazione
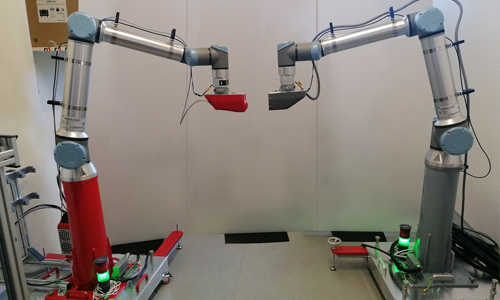
Una tecnologia di imaging unica "RadalyX" sotto forma di 2D e 3D Robotic Imaging System (RIS) è la tecnologia di imaging più moderna. È una piattaforma ad altissime prestazioni in grado di combinare diverse tecniche di imaging, come raggi X, ultrasuoni, profilatura di superfici, tomografia computerizzata ecc., Ed è facilmente adattabile a qualsiasi applicazione.
La nuova generazione dei rilevatori digitali di immagini a raggi X offre una qualità dell'immagine senza precedenti. E tutto questo con una risoluzione spaziale fino al livello micrometrico in un'immagine 2D o addirittura 3D.
Radalytica sta anche lavorando a una versione ad hoc per il campo medico, che ha la peculiarità di effettuare la TAC (tomografia computerizzata assiale) per gli esami molto specifici (impossibili con i sistemi tradizionali).
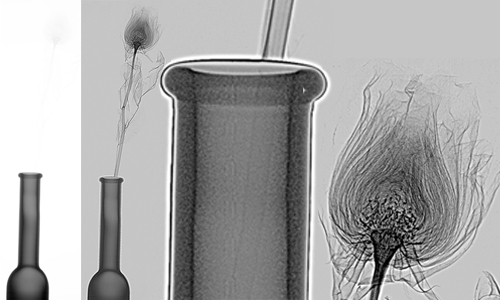
L'immagine a raggi X di una rosa secca dimostra la qualità senza precedenti dell'imaging a raggi X. A differenza di un dispositivo a raggi X standard, che non è in grado di visualizzare una rosa secca in un vaso, un'immagine a raggi X del nostro sistema robotico che utilizza ultrasensibili rilevatori Advacam ad altissima risoluzione e contrasto mostra non solo tutte le parti delicate della testa, ma persino lo stelo dentro la bottiglia!
QUALCOSA CHE FINORA NON È MAI STATO RAGGIUNTO!
Combinazione di metodi di imaging
UNA MACCHINA LI GOVERNA TUTTI!
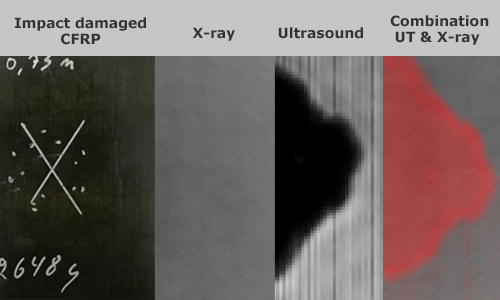
Ad esempio, ultrasuoni ad aria compressa o l’acustica eccitata dal laser (LEA) sono particolarmente efficaci per rilevare delaminazioni in materiali compositi praticamente invisibili ai raggi X. Un buon esempio è un'ala in composito di un velivolo, danneggiata dopo aver colpito un oggetto estraneo. L'immagine a raggi X rivela in modo preciso e chiaro la struttura interna del composito e il suo possibile danno da sottili cricche nel punto di impatto. Tuttavia, la delaminazione nell'area circostante non viene rilevata dai raggi X. L'ecografia a ultrasuoni è al contrario perfettamente adatta per il rilevamento della delaminazione, però dall’altra parte non consente rilevazione di cricche sottili (ad una definizione accettabile).
LA SOLUZIONE È UNA COMBINAZIONE DI ENTRAMBI I METODI.
Ultrasuoni ad aria compressa (UT)
Radalytica è la prima azienda a dimostrare che i raggi X e gli ultrasuoni sono metodi complementari per i controlli non distruttivi. In molti casi, è opportuno utilizzare più di un metodo alla volta per ottenere una migliore panoramica del campione.
- Ultrasuoni ad aria compressa vs. raggi X

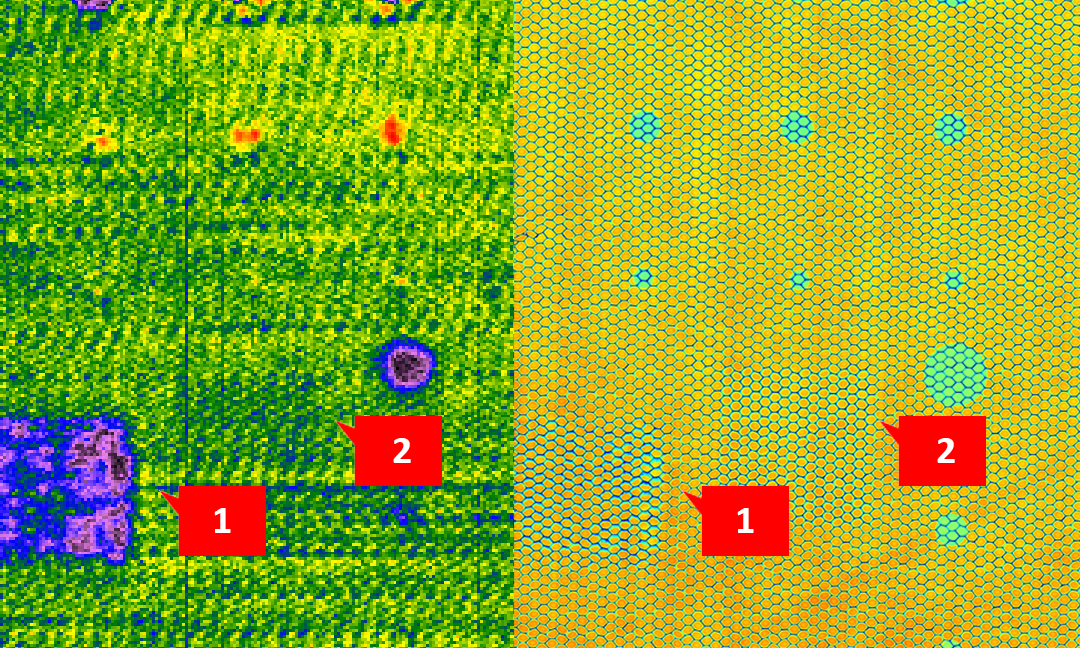
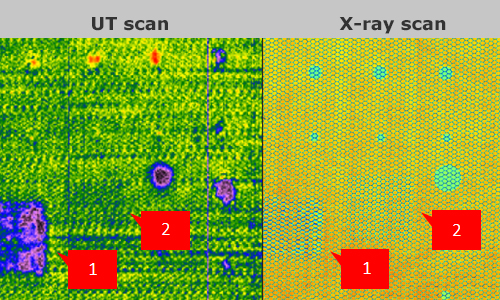
Pannello sandwich a nido d'ape con la simulazione del difetto core-skin
Entrambe le scansioni mostrano gli inserti circolari che simulano la disconnessione del nido d'ape dallo strato esterno. La radiografia (RT) ha rilevato tutte le dimensioni degli inserti fino al più piccolo. L'ecografia a ultrasuoni UT invece ha rilevato gli inserti fino al livello ~ 4 celle.
- Combinazione UT e raggi X
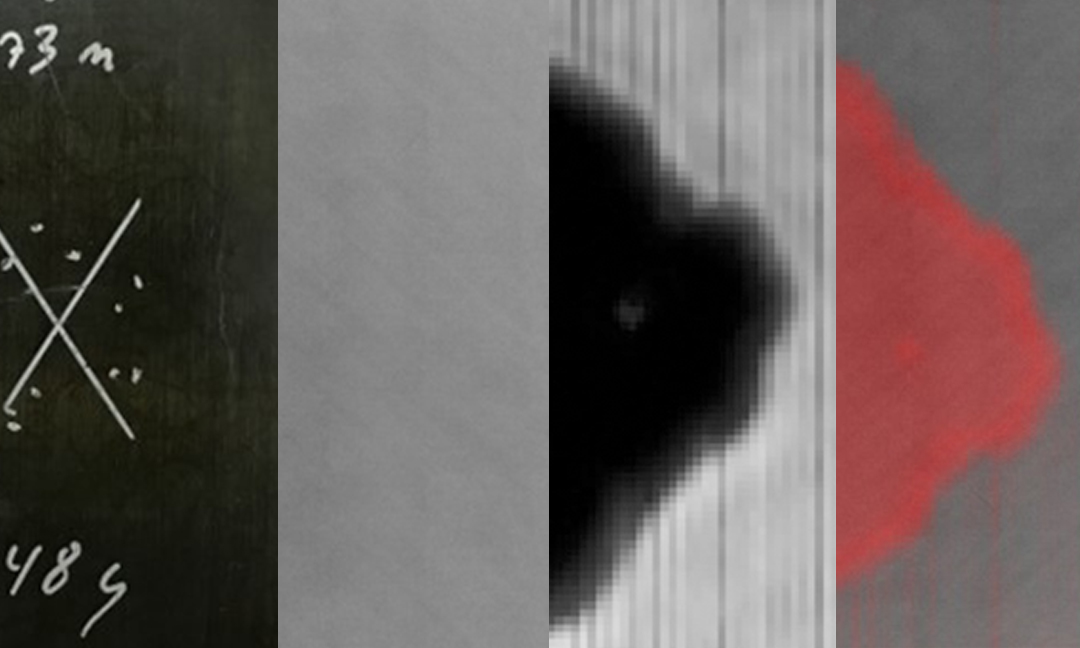
CFRP danneggiato dall'impatto
Confronto tra RT e UT sul campione CRFP Nell'esempio sopra, sia UT che raggi X rilevano l'area danneggiata, UT rileva la delaminazione, ma solo la combinazione dei due metodi mostra tutti i dati necessari - delaminazioni, cricche, orientamento di fibre e perfino le tracce di vernice sul campione.
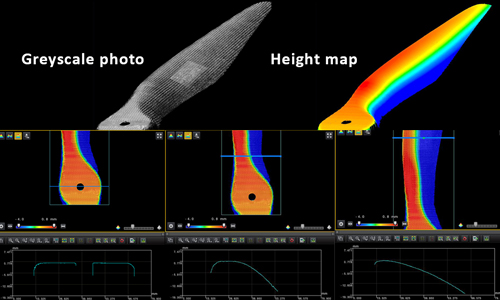
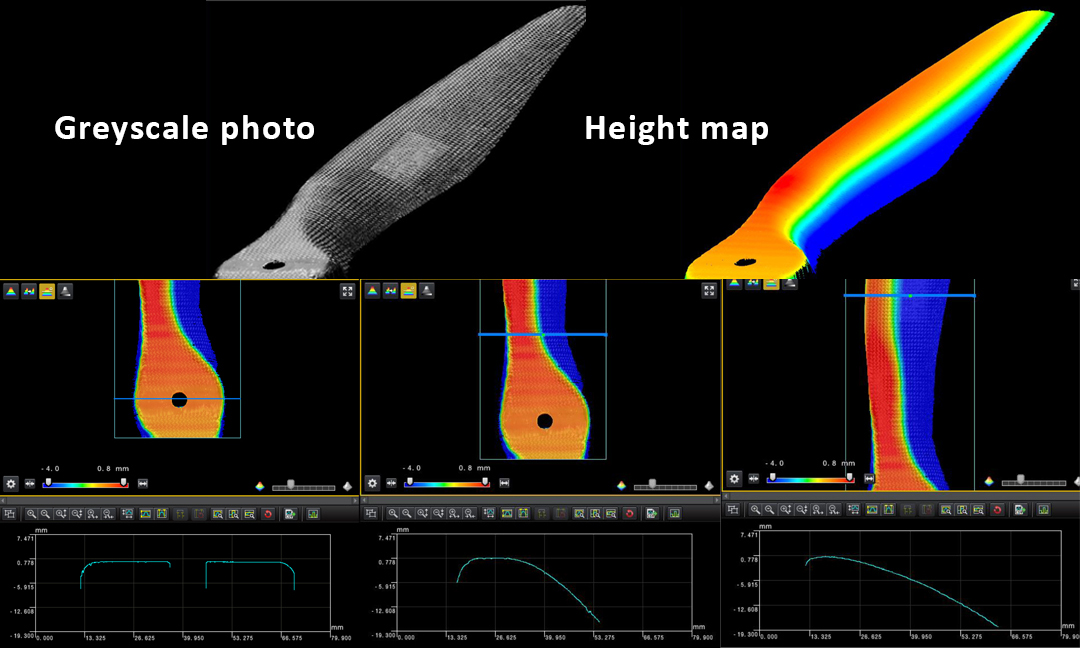
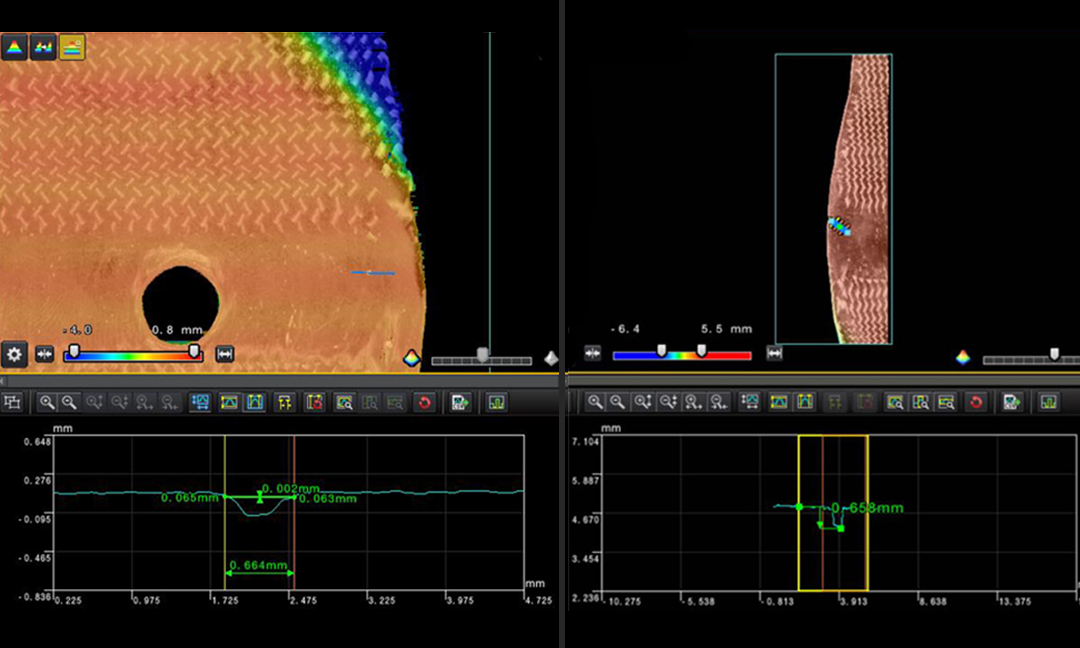
il profilatore laser è uno strumento di imaging che fornisce informazioni precise sulla forma esterna dell'oggetto scansionato con precisione massima fino a circa 30 µm di profondità. Questo strumento può essere utilizzato direttamente per analizzare la precisione delle parti prodotte, inclusa la loro struttura superficiale. Le misurazioni del profiler e le misurazioni con gli altri strumenti di imaging vengono registrate tutte nello stesso sistema spaziale di coordinate. Pertanto, i dati del profiler laser possono anche servire come fonte per le condizioni al contorno esterno per migliorare i risultati delle ricostruzioni acquisite dalla tomografia computerizzata. Il profiler è dotato di sgancio rapido per un veloce cambiamento delle modalità di imaging.

- Profilatore laser 3D
- Profilatura laser
- Ispezione dell'elica del drone
- Ispezione del profilo alare superiore
- di RadalyX
- Profilatura laser
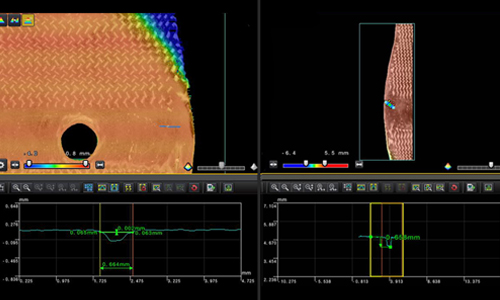
- Dimensionamento dei fori
- di RadalyX
- Profilatura laser
L'imaging in tempo reale con un mouse 3D consente il pieno controllo della posizione e dell'angolo di visualizzazione dell'immagine a raggi X. Semplicemente, una volta spostato e inclinato il movimento del mouse 3D, lo strumento robot seguirà la stessa inclinazione e spostamento. The X-ray image of the given area of the sample is displayed in real time on the screen. Simple manual control using live view creates the perfect tool for locating defects in the inspected structure in 3D. Therefore, inspection with robots is faster, less demanding on data processing compared to CT and can be applied to the selected areas of larger object.

Risposta di movimento intuitiva in tempo reale
3D Mouse Move può essere utilizzato per “insegnare” ai robot durante la programmazione o controllarli in tempo reale per eseguire l’attività.
Controllo dei robot da un altro luogo
IL GRANDE VANTAGGIO è anche la possibilità di controllo remoto del robot indipendentemente dalla posizione dell'utente.